Progetto di Ricerca ROBILAUT
Campionamento Automatico Ecosostenibile di terreni contaminati mediante l’utilizzo di un Robot mobile e la Digitalizzazione delle missioni di campionamento:

Progetto di Ricerca ROBILAUT per lo studio, la progettazione e la realizzazione di un dispositivo robotico intelligente a navigazione autonoma sotterranea, per il prelievo di aliquote di terreno “indisturbato”, all’interno di cumuli di terreno e la loro contestuale omogeneizzazione, per l’ottenimento di campioni rappresentativi, destinati al successivo esame e caratterizzazione analitica di laboratorio.
____________________________________
Il risultato finale ottenuto è quello di un dispositivo costituito da tre componenti: 1) un sistema di digitalizzazione dei luoghi basato sull’uso di drone e di algoritmi di calcolo automatico delle coordinate dei punti rappresentativi di campionamento; 2) Robot costituito da una “Testa” campionatrice (a diverse profondità) ed una “Unità Mobile” di supporto opportunamente attrezzata; 3) Sistema di Controllo e Gestione della “Missione” di campionamento automatico digitalizzato.
____________________________________________________________
________
Il Progetto ROBILAUT, della durata complessiva di 36+3 mesi (dal 24 febbraio 2020, in corso di completamento 2023) e dal costo complessivo: 3.566.437,50 €, è stato realizzato a cura delle società proponenti NATURA Srl (capofila); OCIMA Srl e dell’Università degli Studi di Cassino e del Lazio Meridionale (UNICAS), con il supporto agevolativo del Ministero dello Sviluppo Economico (MISE), a valere sull’Asse 1, azione 1.1.3. del Programma Operativo Nazionale «Imprese e Competitività» 2014-2020 FESR.


___________________________________________________________
La finalità del progetto ROBILAUT è quella di sviluppare un approccio strumentale ecosostenibile e innovativo per il campionamento di terreni, sedimenti e assimilabili, in grado di ridurre drasticamente (quasi a zero) il rischio per la salute per il personale di campionamento (campionatori) direttamente coinvolto, nonché gli impatti legati all’utilizzo di mezzi meccanici di movimentazione e trasporto.
Il progetto consentirà di rendere più oggettive e rappresentative, più economiche ed ecosostenibili, le attività di prelievo di campioni di terreno (e più in generale, di rifiuti assimilabili), riducendo al minimo il rischio di contaminazione per gli operatori che a tutt’oggi operano con procedure manuali.
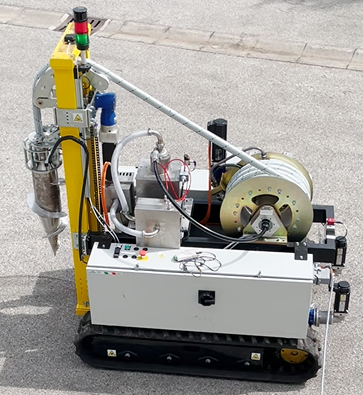 1 – Dispositivo Robotico ROBILAUT (TestBed): Testa perforatrice (rotore/contro-rotore) e campionatrice + Unità Mobile |  2 – Dispositivo Robotico in campo (TestBed) |
  3 – Drone di Digitalizzazione e Sistema di Localizzazione e Controllo Missione di campionamento |   4 – Drone in volo per la Digitalizzazione del Cumulo |
 5 – Cumulo e Dispositivo Robotico |  6 – Cumulo digitalizzato 3D |
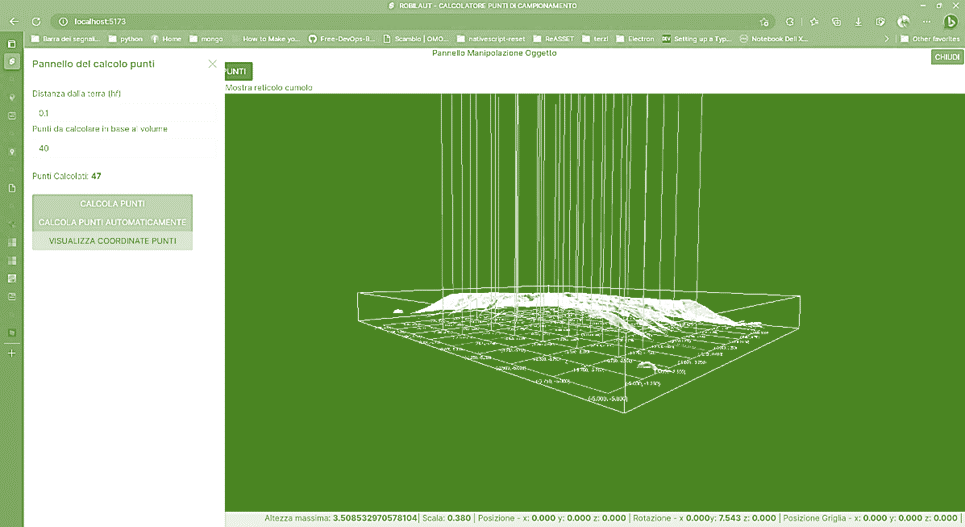 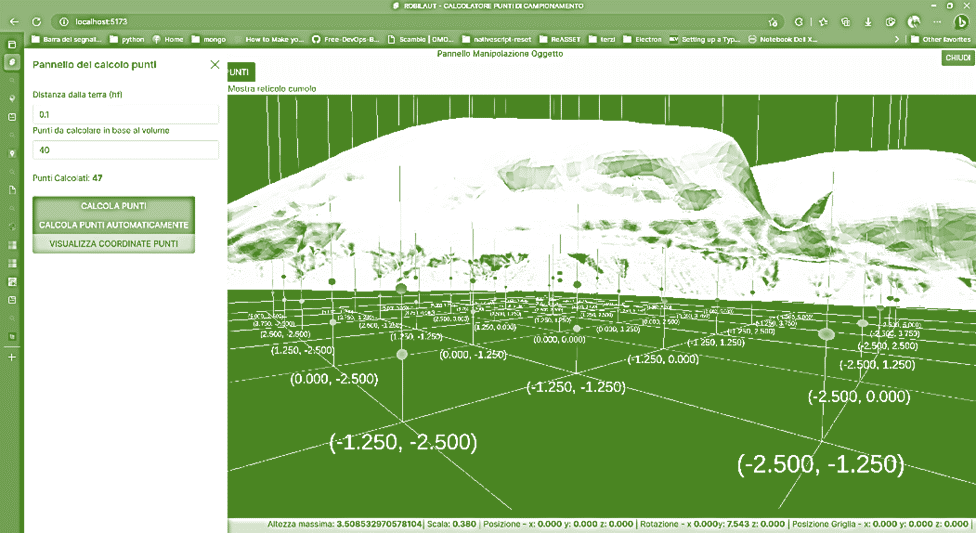 7 -Software di Reticolazione Punti di Prelievo | 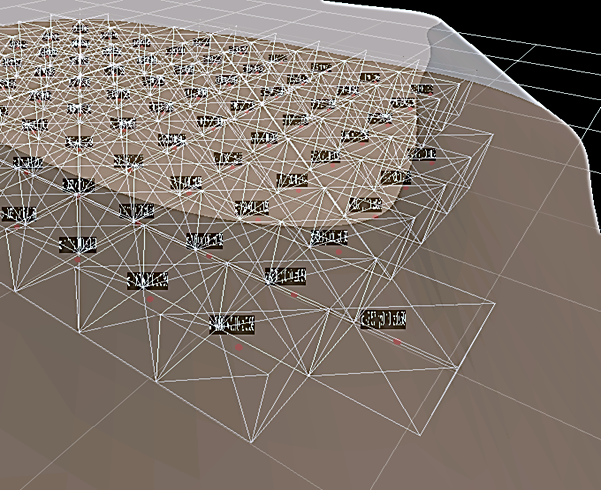 8 -Reticolo dei punti (x,y,z) di prelievo aliquote campione . |
 9 – Pit-Stop del Dispositivo Robotico |  10 – Vista Dispositivo Robotico in campo su rampa di accesso |
 11 – Vista Dispositivo Robotico in campo su rampa di accesso | 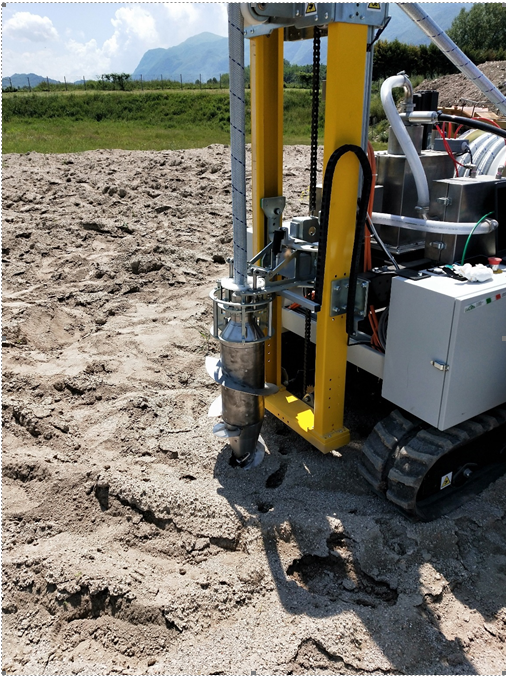 12 – Vista Dispositivo Robotico in campo prima del campionamento |
 13 – Vista Dispositivo Robotico in campo durante il campionamento |  14 – Vista Dispositivo Robotico in campo durante il campionamento |
.

Test Finale ROBILAUT c/o Cumulo Area di Testing: presenti i Partner NATURA, OCIMA. UNICAS e i consulenti CSM/RINA e IPS
Con ROBILAUT sarà possibile rendere più oggettive e rappresentative, più economiche ed ecosostenibili (e sicure) le attività di prelievo di campioni di terreno (e più in generale, di rifiuti assimilabili), attualmente disciplinate dal metodo di campionamento UNI 10802:2013 (“Campionamento manuale, preparazione del campione ed analisi degli eluati”). Ad oggi infatti, per effettuare manualmente questa tipologia di campionamento, in funzione della profondità di prelievo desiderata e dell’eventuale esigenza di ottenere un campione “indisturbato”, vengono ad essere applicate diverse metodologie e attrezzature (utensili e carotieri manuali, escavatori e trivelle meccaniche).
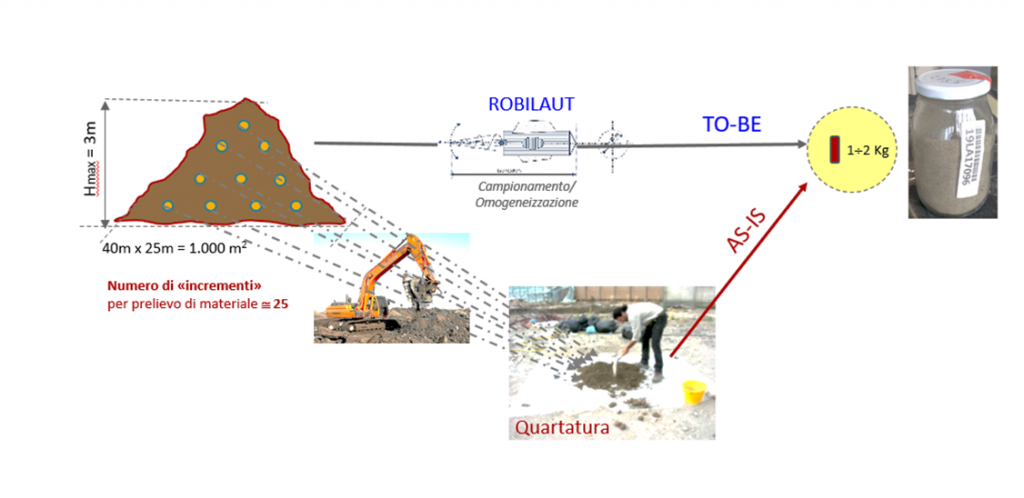
ROBILAUT, non prevede l’intervento diretto dell’uomo e di macchine di movimentazione terra, nonché la
produzione di rifiuti derivanti da procedimenti di “quartatura”, come nel caso della procedura manuale
tradizionale (v. UNI 10802:2013), dove gli incrementi sono ottenuti manualmente con il supporto di macchine di movimentazione terra.
I limiti della tradizionale procedura manuale che si vogliono superare con il progetto ROBILAUT, sono qui di seguito elencati in sintesi:
– La ripetibilità limitata della procedura, in funzione della manualità del processo;
– Il basso rapporto “rappresentatività del campione/tempo di campionamento”;
– Costo elevato, anche in funzione dell’esigenza di impiegare mezzi meccanici;
– Rischio per la salute degli operatori in caso di esalazioni nocive.
Lo scenario di riferimento del progetto ROBILAUT è quindi, quello che si riferisce alla digitalizzazione delle operazioni di campionamento, ossia di prelievo “geo-referenziato e tracciato” di “campioni indisturbati” (tal quale), ovvero di matrici solide come terreni (e assimilabili), “statisticamente rappresentativi” del livello di inquinamento presente in un predefinito “sito contaminato” preso in esame, al fine ad es. di una eventuale successiva bonifica dello stesso.

La “rappresentatività” di un campione e funzione diretta del numero di incrementi raccolti che lo costituiscono. Un’operazione di campionamento nella sua totalità, prevede che vengano fissati gli obiettivi del campionamento fino all’ultima fase in cui i dati ottenuti sono analizzati a fronte di questi obiettivi.
In ogni caso, i campioni prelevati, prima di essere portati in laboratorio per essere analizzati, subiscono sul posto un processo di “omogeneizzazione” che può avvenire sia mediante l’impiego di attrezzi manuali, che di attrezzi meccanici (miscelazione a rotazione).
L’impatto dell’attività di campionamento sugli esiti analitici è molto significativo e spesso un campionamento svolto in modo inappropriato può comportare un errore di valutazione, che può avere riflessi enormi sia di tipo procedurale che legale ed economico.
In ultima analisi e rispetto al mercato di riferimento, la finalità del progetto ROBILAUT è quella di rendere il campionamento di matrici solide (terreni, sedimenti, rifiuti) più ecosostenibile ed economico, senza rinunciare alla qualità, a favore della produttività e della competitività del laboratorio di analisi ambientali.
È possibile ipotizzare che un tale tipo di dispositivo robotico a navigazione sotterranea possa essere impiegato utilmente anche in altri contesti di mercato, come il controllo della qualità del grano o dei cereali trasportati sfusi in grande quantità (trasporto navale), ovvero il campionamento in siti particolarmente inquinati e pericolosi.
Attuale stato di Avanzamento del progetto (aprile 2023). Il Progetto è attualmente nella fase di test e validazione presso la sede dei cumuli da analizzare (BN).